
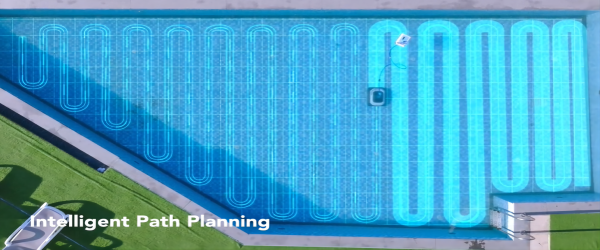
Kun la evoluo de servo robotteknologio,subakvaj naĝejoj purigantaj robotojnestis vaste uzataj en la merkato. Por atingi aŭtomatan itineran planadon, kostefikaj kaj adaptaj ultrasonaj subakvaj intervalaj malhelpaj evitaj sensiloj estas esencaj.
________________________________________________________________________________________________________________________________________________________________________________
DYP-ojL04 subakva ultrasona intervala sensiloprovizas al vi la distancon inter la subakva roboto kaj la mezurita objekto, desegnita por facila integriĝo en via projekto aŭ produkto.
Produktaj avantaĝoj:
■ Mezura gamo: 3m
■ Blinda zono: 5cm
■ Precizeco: ≤5mm
■ Protekta grado: IP68 entuta muldado
■ Stabileco: adapta akva fluo kaj bobel-stabiliga algoritmo
■ Prizorgado: fora ĝisdatigo, sononda restarigo de problemoj
■ Aliaj: akva elirejo juĝo, akvotemperaturo retrosciigo
■ Labora tensio: 3.3 ~ 5 VDC
■ Eliga interfaco: UART kaj RS485 laŭvola
________________________________________________________________________________________________________________________________________________________________________________
Rilataj Produktoj:
