Ultrasona distancsensilo
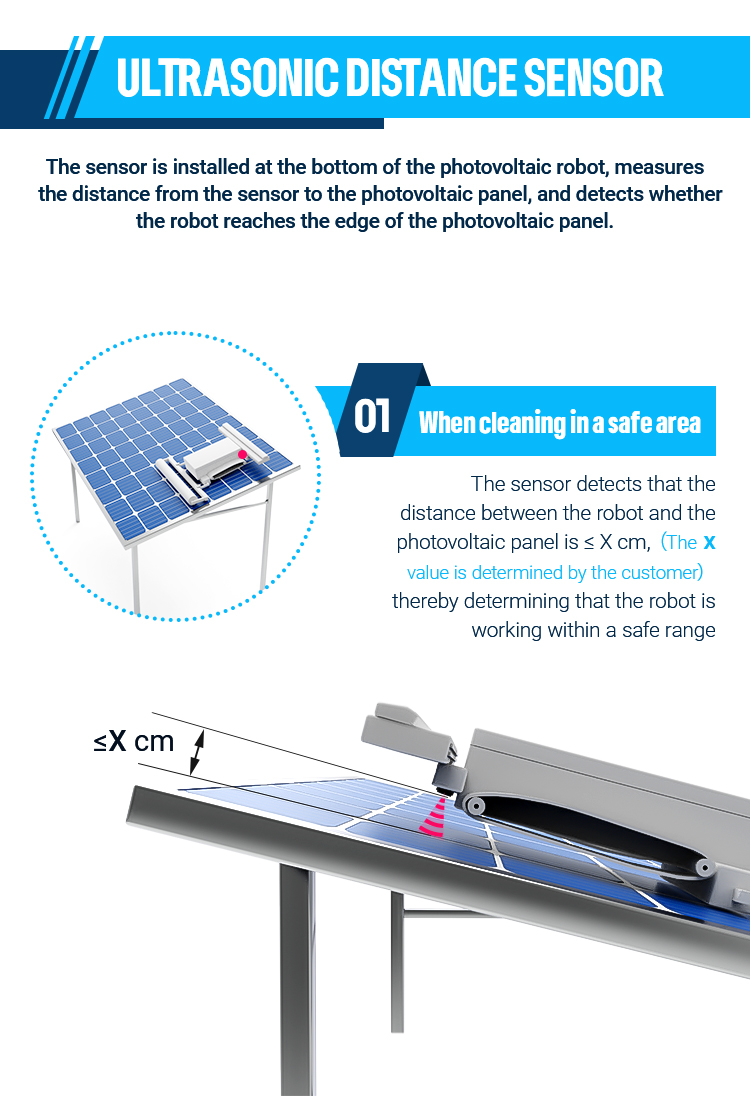
La sensilo estas instalita ĉe la fundo de la fotovoltaeca roboto, mezuras la distancon de la sensilo ĝis la fotovoltaeca panelo, kaj detektas ĉu la roboto atingas la randon de la fotovoltaeca panelo.
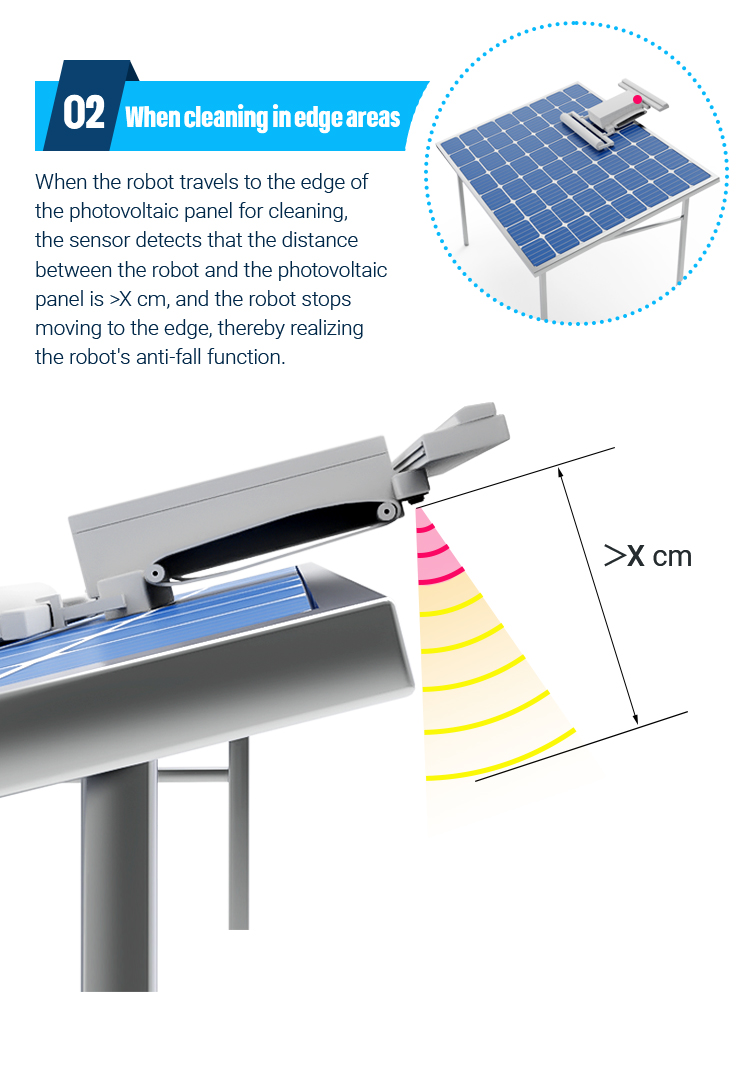
La fotovoltaeca purigadroboto funkcias en senpaga marŝmaniero sur la fotovoltaikaj paneloj, kiuj estas facile fali kaj damaĝi la ekipaĵon; la promenvojo deflankiĝas, influante efikecon. Uzante variigan sensilon, vi povas kontroli ĉu la roboto estas suspendita en la aero kaj helpi la roboton marŝi en la centro.